|
As mentioned in the ICAM architecture and implementations page, the first prototype of ICAM, ICAM-I, was implemented as a rule-based expert system, coded in Gensym's G2 artificial intelligence shell, linked with multiple MATLAB processes in which ICAM's agents run. The infrastructure for this realization of ICAM incorporated MPI for inter-agent communications. We built our first prototype system with this infrastructure, as shown in Figure 2. This design and prototype were products of Dr. Atalla Sayda's PhD research; ICAM-I is described in more detail in "Prototype Design of a Multi-agent System for Integrated Control and Asset Management of Petroleum Production Facilities", Proc. American Control Conference, Seattle, Washington, 11-13 June 2008; other aspects of this activity have been reported in the UNB team's publications. 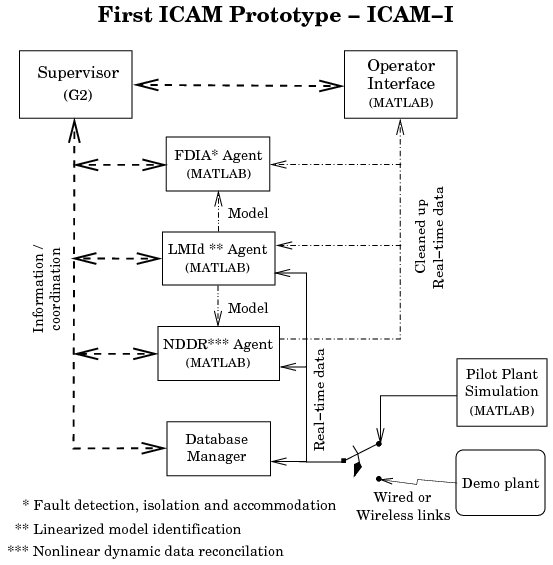 Figure 1. First Prototype ICAM System: ICAM-I Return to the UNB PAWS Home Page Information supplied by: Jim Taylor Last update: 12 May 2010 Email requests for further information to: Jim Taylor (jtaylor@unb.ca) |