|
A high-fidelity model of a two-tank three-phase gravity separator model was developed and implemented in MATLAB, to facilitate the testing and demonstration of ICAM. The first tank is simply called the Separator, while the second is called the Treator. This process was chosen for it's complexity and difficulty, and also to mimic the dynamics of the physical pilot plant on site at the College of the North Atlantic in Newfoundland, a partner in the PAWS project. Early development of ICAM Agents was done using a jacketed continuous stirred-tank reactor model, a common academic process control example with two control loops, one for level and the other for temperature. In contrast, the three-phase gravity separator model (see figure 1) has five loops, as shown, and has "stiff" dynamics (some slow states, e.g., liquid levels; and some very fast states, e.g., pressure in the second vessel) which are difficult to simulate. 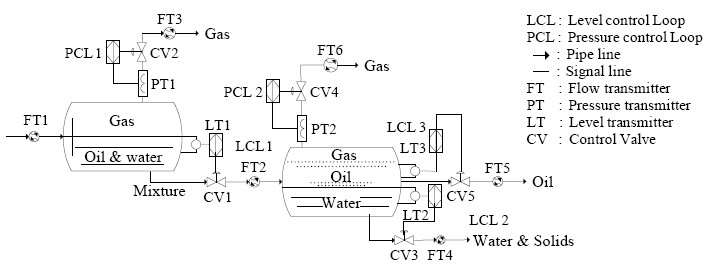 Figure 1. Pilot Plant Schematic The mathematical model of the pilot plant is described in A. Sayda and J. H. Taylor, "Modeling and Control of Three-Phase Gravity Separators in Oil Production Facilities", Proc. American Control Conference, New York, 11-13 July 2007. This part of the UNB PAWS effort has been completed and delivered. Return to the UNB PAWS Home Page Information supplied by: Jim Taylor Last update: 9 November 2009 Email requests for further information to: Jim Taylor (jtaylor@unb.ca) |