|
Wireless networked control systems have begun to gain acceptance during the last decade. The pace of application has been slow, however, due to the reluctance of industry to make the accommodations necessary to allow wireless paths to be incorporated in process control loops, thus limiting the potential benefits of wireless systems. The problem is that there are conflicts between maintaining the performance (and particularly stability) of a control loop, which can be degraded by slow data rates and delays in a wireless path, and the usual objectives in managing a wireless network, namely freedom to configure the network to maximize efficiency and to adjust data rates in the network to conserve energy consumption in the network nodes, which are often battery powered. We are working to address this conflict by developing a wireless network coordination agent (WNCA), as part of the ICAM intelligent supervisory control system, which will grant the wireless network management software in the Gateway as much latitude in meeting its objectives as possible while maintaining the performance of control loops that incorporate wireless paths. A schematic showing the role of the WNCA as a mediator between the ICAM system and the WSN is shown in Fig. 1.  Figure 1. WNCA Agent in the ICAM Framework The two control-critical paths are shown in Fig. 2; these support data transfer from sensor-to-controller and controller-to-process. The data rates in these paths must be fast enough and the path delays short enough such that control system performance is not compromised. In essence, the path delays for a proposed configuration are determined by the WSN, and the WNCSCA accepts it or rejects the proposal if delays are too long; once the delay criterion is satisfied the WNCSCA evaluates the minimum data rates needed to keep the percent overshoot of each loop below an acceptable threshold. Clearly, these control-related constraints may severely hamper the Gateway from meeting its goals, as mentioned above. We reduce these constraints as much as possible by letting the Gateway know the state of the control loops -- for example, if the process variables are in a transient state then the control-related constraints must be obeyed, but if the process variables are in steady state then control loops can be opened, the control-related constraints relaxed, and the ICAM supervisor merely monitors the process variables at a slower rate so that disturbances or set-point changes can be detected; then the loops can be closed again and control-related constraints immediately reimposed. Many industrial control systems operate in steady state much of the time, so this strategy should be of substantial benefit to managing the WSN efficiently and effectively. 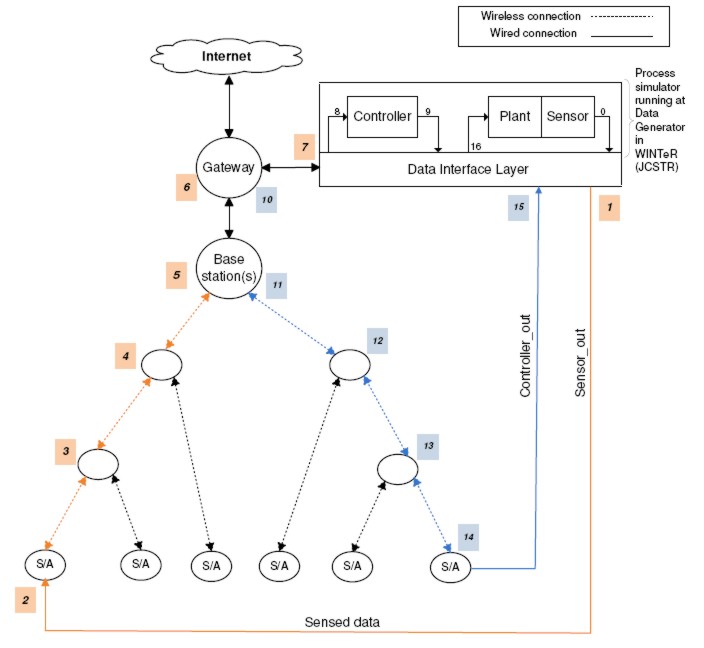 Figure 2. WNCA Agent Communication / Data-flow Scheme A prototype of the Wireless Network Coordination Agent was developed by Hazem Saad Ibrahim. This contribution to the PAWS deliverables was completed on 24 March 2010. Future development will focus on additional concerns, such as the effects of jitter and variable WSN loading. Return to the UNB PAWS Home Page Information supplied by: Jim Taylor Last update: 24 March 2010 Email requests for further information to: Jim Taylor (jtaylor@unb.ca) |