Lightweight myoelectric arm
using custom motors and gears
using custom motors and gears
Lead Institution: UNB
Openings: We are no longer accepting students for this project
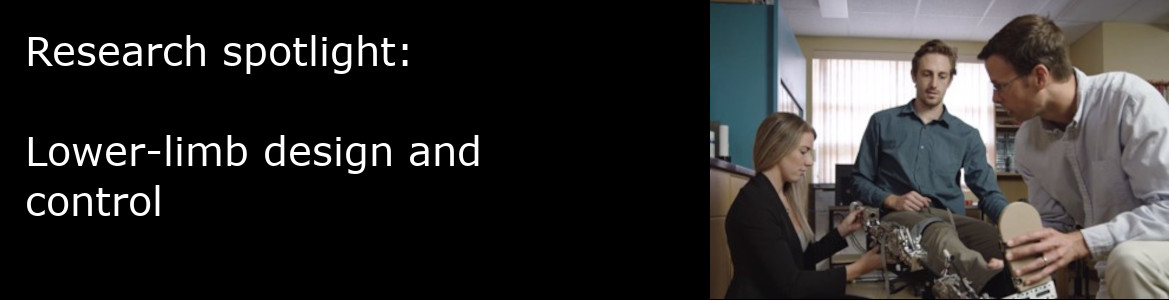
Controlling lower-limb prostheses or exoskeletons is challenging because the very act of walking can be thought of as continuously putting out a foot to prolong a fall. Classical approaches to stability produce very robotic-looking gait such as Honda’s Asimo. We have applied a powerful concept termed virtual constraints to the control of robotic prostheses and exoskeletons to achieve stable, biomimetic gait. We developed a new phase variable that enabled the existing concept of virtual constraints to be applied to robots with real feet (vs. point feet) and proved its stability [1]. Further work demonstrated its effectiveness on robotic prostheses [2-3]. We also demonstrated that humans seem to use a similar approach in regulating their gait [4]. Parallel work [5-7] demonstrated the efficacy of an alternative technique using the biomimetic approach of joint-based quasi-stiffness regulation. We have recently expanded on this approach to enable a control strategy with a deadzone [8] (useful for exoskeleton training purposes) and a control strategy that enables the end-user to customize the things they care about [9].
We’ve also designed and fabricated exoskeletons that have self-aligning joints and a modular design that enables us to reuse the same mechanism for joints that have different torque-speed requirements [10,11].
[1] Gregg R, Sensinger J. (2014). Towards biomimetic virtual constraint control of a powered prosthetic leg. IEEE Transactions on Control Systems Technology
[2] Gregg R, *Lenzi T, Hargrove L, Sensinger J. (2014). Virtual Constraint Control of a Powered Prosthetic Leg: From Simulation to Experiments with Transfemoral Amputees. IEEE Transactions on Robotics.
[3] Greg R, Sensinger J (2019). Effective shape controller for lower limb. United States patent 10314723
[4] Gregg R, Rouse E, Hargrove L, Sensinger J. (2014). Evidence for a Time-Invariant Phase Variable in Human Ankle Control. PLOS One
[5]Lenzi T, Hargrove L, Sensinger J. (2014). Speed-adaptation mechanism: robotic prostheses can actively regulate joint torque. IEEE Robotics and Automation Magazine
[6] Lenzi T, Sensinger J (2020). Stance controller and related methods. United States patent 10799373
[7] Lenzi T, Sensinger J (2019). Minimum jerk swing control for assistive device. United States patent 10213324
[8] Campbell S, Diduch C, Sensinger J. (2020). Autonomous assistance-as-needed control of a lower limb exoskeleton with guaranteed stability. IEEE Access
[9] Stewart K, Diduch C, Sensinger J. (2019). Assistive exoskeleton control with user-tuned multi-objective optimization. IEEE International Conference on Rehabilitation Robotics
[10] Grandmaison C, Losier Y, Sensinger J. (2017). A high torque modular actuator design for a lower limb exoskeleton. IEEE International Conference on Intelligent Robots and Systems
[11] Grandmaison C, Sensinger J (2021). Powered lower limb devices and methods of control thereof. USA patent 11191653