Projects
AUV
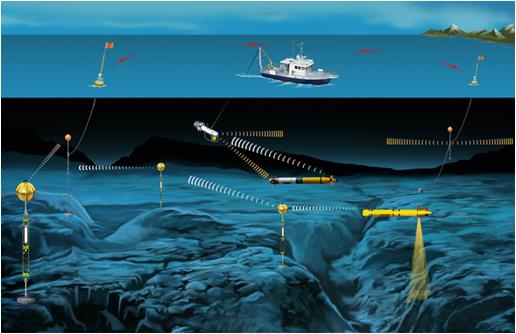
The COBRA team is collaborating with Defence R&D Atlantic to develop mission plans for underwater mine countermeasures MCM with Autonomous Underwater Vehicles (AUVs).
 They
have a fleet of IVER2 AUVs (shown right) that are equipped with sidescan sonar
sensors, cameras, doppler velocity logs, and communicate via acoustic modem
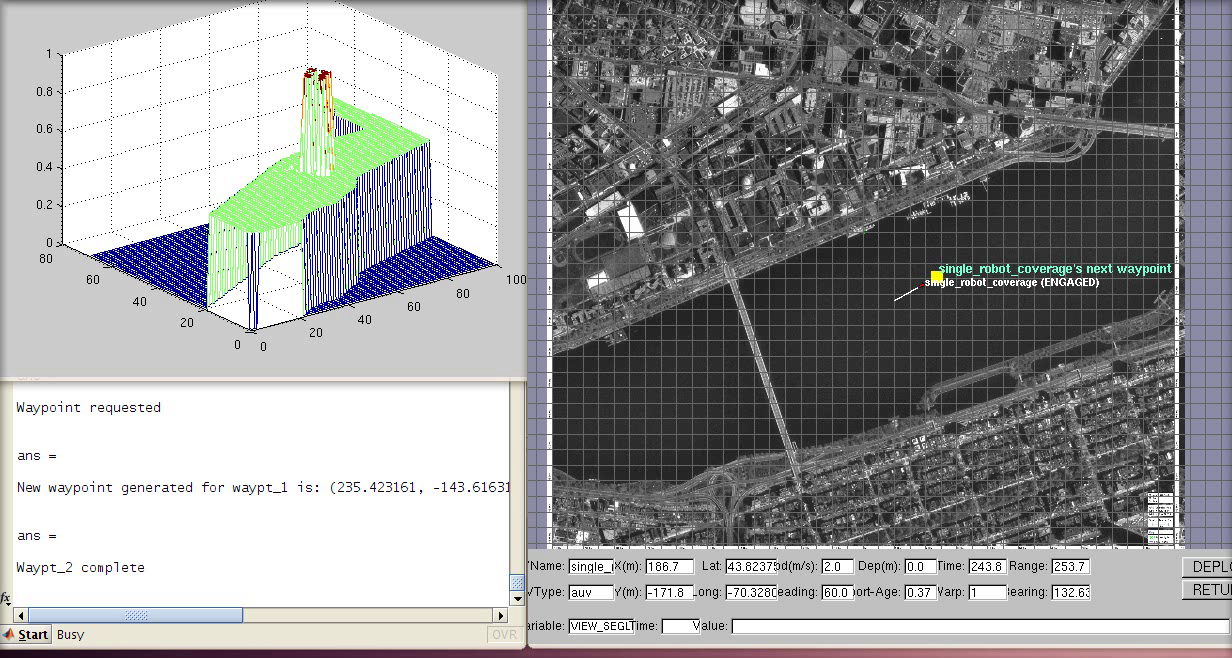
They
have a fleet of IVER2 AUVs (shown right) that are equipped with sidescan sonar
sensors, cameras, doppler velocity logs, and communicate via acoustic modemThe COBRA team is using the Mission-Oriented Operating Suite (MOOS-IvP) to simulate and test algorithms. Shown below is the MOOS simulator and the Matlab controller which generates new waypoints when requested, and also keeps track of the probabilities of detection over the entire workspace.
For more information about the AUV project please contact Liam Paull.
UAV
Fixed-Wing Aircrafts
 Fixed wing aircraft use their forward velocity to produce lift and fly. This efficient and high speed method of travel is ideal for searching large areas and carrying large payloads. Military, police, and civilian operations are primarily using this type of system for situational awareness around the world.
Fixed wing aircraft use their forward velocity to produce lift and fly. This efficient and high speed method of travel is ideal for searching large areas and carrying large payloads. Military, police, and civilian operations are primarily using this type of system for situational awareness around the world.
 Helicopters
Helicopters
Helicopters are extremely agile in the air and able maintain their position or hover similar to a humming bird. This ability makes them very useful for detailed observations.
Quad-rotor Helicopters
Quad-rotor helicopters have hovering flight capabilities similar to a regular helicopter but excel as small unmanned aircraft due to their simple design and stability.
To learn more about the UAV program please contact Carl Thibault.
UGV

An Unmanned Ground Vehicle (UGV) consists of many components, such as motion controllers, sensors, and data processors, that work together to enable it to carry out complex tasks and allow it to be an effective member of a multi-agent system. UGV’s can be used for a variety of applications, from search and rescue to mapping out an environment. They are capable of simple tasks, like obstacle avoidance and intricate tasks such as waypoint following.
To learn more about the UGV program please contact Tyler Edwards.
SLAM
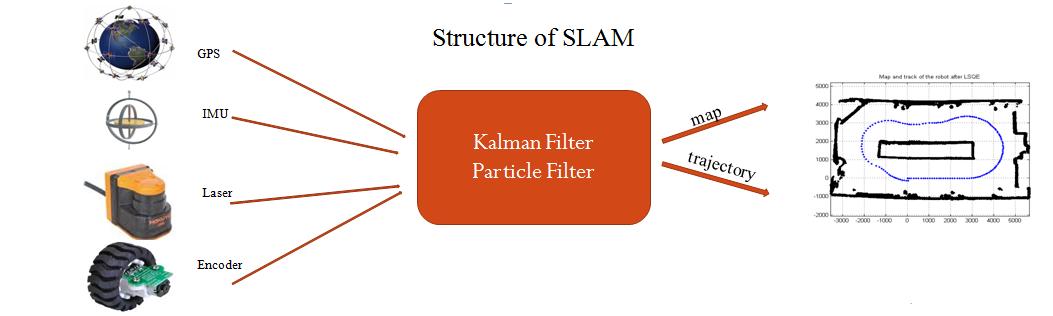
Simultaneous Localization and Mapping (SLAM) is a process used by autonomous robots and vehicles to construct a consistent map of the environment while at the same time keeping track of their location.
To learn more about SLAM please contact Sajad Saeedi.
Multi-Agent Systems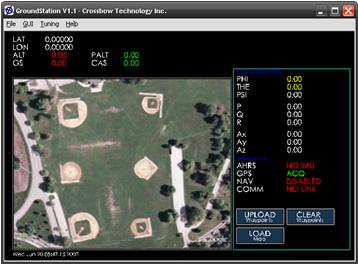
COBRA is developing a custom autopilot and ground control station for all of COBRAs unmanned vehicles. This allows for easy integration of advanced controllers and flexibility for all types of aircraft, helicopters, ground, and underwater systems. The hardware simulation environment is shown on the right.
 The future of robotics is Multi-Agent Systems: systems that use many different kinds of robots together to achieve a task more efficiently.
Using many different types of vehicles together requires more advanced control systems. In addition, measures must be taken to account for the undersea bandwidth-limited environment.
The future of robotics is Multi-Agent Systems: systems that use many different kinds of robots together to achieve a task more efficiently.
Using many different types of vehicles together requires more advanced control systems. In addition, measures must be taken to account for the undersea bandwidth-limited environment.
To learn more about MAS please contact Dr. Howard Li.

