Development of a Multi-Agent System Based on MIRO for Countering Underwater Threats
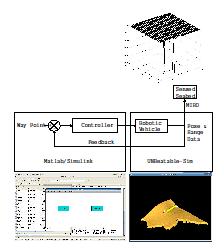
Defence Research and Development Canada is studying the role that multi-agent systems (MAS) could potentially play in countering mines and other undersea threats. Towards that end DRDC needs to develop a multi-agent system for the underwater vehicles and other systems that DRDC uses. The agents are to control multiple vehicles/systems at the mission level, have decision-making ability, be adaptive to the environment, have updated sensor information, etc. As well, the MAS will serve as a test bed for working out concepts of employment with multiple vehicles for a variety of operational scenarios with emphasis on collaborative and cooperative missions. The UNB research team uses the MIRO framework to develop the MAS. A model server is developed to model vehicles and simulators. Sensors are simulated to interface with MIRO. A simple visualizer is developed for the visualization of the underwater vehicles. Matlab control modules are developed to control the vehicles through the MIRO framework. Planning and navigation control is developed for the MAS. In the simulated environment, Autonomous Underwater Vehicles (AUVs) navigate with proper path planning and obstacle avoidance behaviors. All services are based on MIRO giving potentials switch from the simulation to the hardware of the AUVs directly. Interface between Matlab and the MIRO framework is developed.