For years, parallel parking has overwhelmed new drivers, thus it is important to
develop an automatic parallel parking system that will release new drivers from frustration.
Although autonomous parking systems might not be as universal as air bags, they certainly
will be an attractive feature that will be widely used in the future. In this project, we
will implement a backward parallel parking algorithm that will imitate the parking process
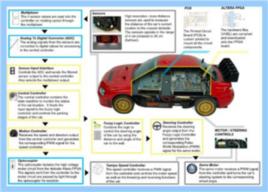
for drivers. Sharp infrared sensors are installed to measure the distance and modified
servomotors are connected to drive mobile robot. Some initial design prototypes have been
completed. A prototype developed using C++ demonstrates that the parking algorithm could
be modeled using a fuzzy logic controller. Since C++ is a high level language which requires
an operating system to execute, the performance of the parking system is relatively low.
It is also difficult to put the design into production due to the higher cost and hardware
requirements. FPGA is a popular approach for developing digital hardware and the simple
implementation using VHDL also allows an increase in performance. The production of the parking
system becomes cost-effective and the design can be modified easily. By using VHDL to
implement the parallel parking algorithm, calculations required for the system can be done
concurrently. As a result, output can be generated at a faster rate, allowing for finer and
more accurate adjustments to the vehicle's control system.